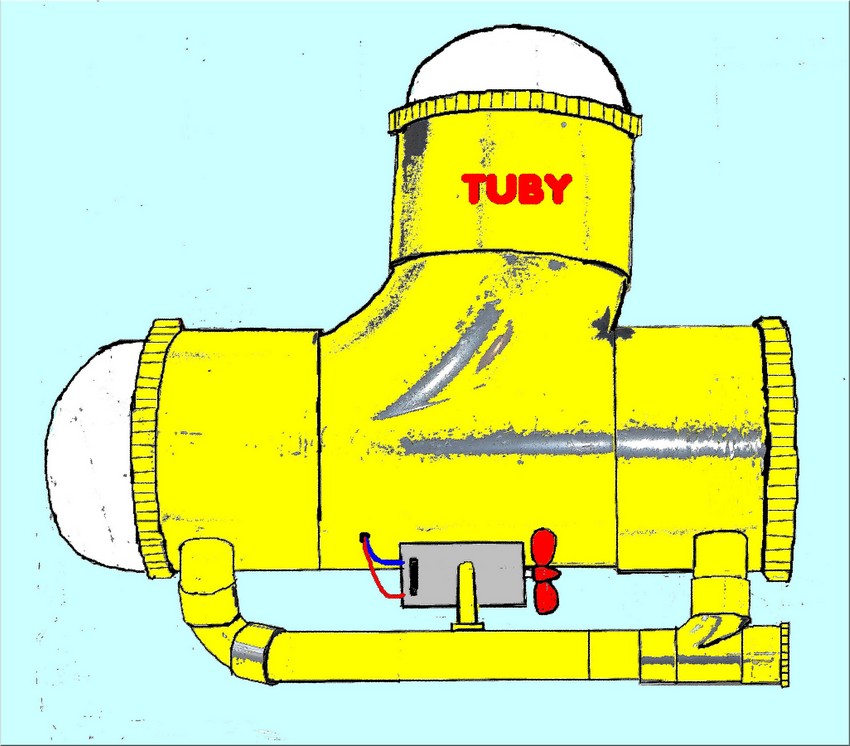
Voici à quoi ça pourrait ressembler.
Un défi technique (pour moi), la construction d'un sous marin RC.
Pour débuter je souhaitais faire simple et pas trop cher et une construction en tube PVC me paraissait une solution.
Au départ pas mal d'interrogation et à l'occasion d'une démonstration sous marin en piscine à Meaux en février 2014 j'ai pu poser pas mal de questions et voilà, je me lance.
Ce seras donc un sous marin d'exploration (un jaune) en tube PVC en té avec deux moteurs externes genre speed 380, un baxter et une pompe à engrenages.
Dans le genre du STROEP paru dans MRB de janvier 2014.
Pas de plan pour commencer, on assemble les tubes PVC à la demande.
Débutant en la matière, je risque de faire des grosses boulettes, voir de me planter complètement, certainement avoir des revers mais je compte sur vous pour me faire redresser la barre.
Voici donc en image ma construction, soyez indulgent et si le coeur vous en dit, n'hésitez pas à m'écrire.
Un clic sur les images permet de les agrandir.
gwenael.modelisme=Globul3.
forumsousmarin.fr=Minimog01.
homebuiltrovs= ROV jaune PVC (en anglais).
geckogeek.fr= ROV PVC.
shamwerks.com=Bubul, sous marin jaune avec plans.
dipi1.free.fr=Dipi1, sous-marin jaune (prototype 3).
franquin.org= Le petit sous marin jaune de spirou.
forumsousmarin.fr= Le Naudule.
ggallot.free.fr=PVC 125.
aliexpress=Paire de moteurs avec hélices.
instructables.com=ROV PVC.
pierreyerokine=L'ATLANTIS.
forumsousmarin.fr=Sous marin d'exploration TELEGONOS.
sousmarin1rc.canalblog.com= Propulsion schottel graupner 1761 pour sous marin RC8 à RC13.
Voici à quoi ça pourrait ressembler.

Le tuyau PVC en té appellation "culotte" 87° diamètre 100 mm.

Les trois bouchons diamètre 100mm.
Le pot de colle PVC avec pinceau.

Un tube de colle PVC gel et un tube de graisse silicone.

Les tubes , té, manchons, coudes et bouchons D40.

Après collage des bouchons, premier essai d'étanchéité en lestant avec 4 kg de plomb, bilan: 1 petite cuillère à café d'eau au bout de 2 heures malgrès la faible profondeur d'immersion, il faut que j'approfondisse le problème.

Après observation du bord du tube, on voit quelques bavures donc ponçage pour avoir un chant plat pas mal de graisse silicone et nouvel essai d'étanchéité, plus que quelques gouttes.

Sur l'intérieur du bouchon la portée pour le joint torique ne fait que 4 mm, et l'axe du joint torique se trouve à cette distance du bord du tube, donc ponçage maximum du bord du tube bien à plat sur une feuille d'abrasif pour que le joint torique porte bien, nouvel essai et là plus d'eau, reste à essayer à plus grande profondeur.

Découpe de deux tubes longueur 95mm et quatre tubes longueur 60mm dans notre tube de 1 mètre D40.

Après ponçage des parties à assembler, collage des bouchons, tubes, coudes té et manchons pour faire les patins de notre submersible.
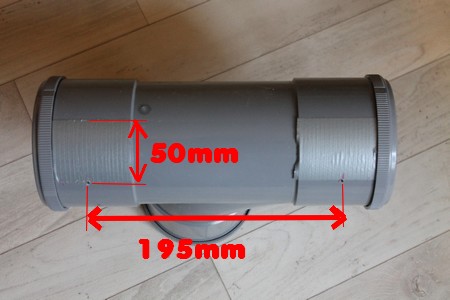
Une ligne de moulage existe sous le tube, elle va nous servir de référence pour le perçage des trous. Le long de cette ligne on met un bout de ruban adhésif de 5 cm de large de part et d'autre, ça nous permet de tracer les centres de perçage écartés de 195mm, idem pour l'autre face.

Perçage des quatre trous avec une scie cloche de 40mm, une de 38mm aurait mieux convenue car il y a un peu de jeu.

Collage des pieds avec un gros congé de colle (le tube gel qui ne coule pas).

Ponçage des quatre tubes à l'intérieur de façon à garder 5 mm qui dépassent pour collage à l'intérieur avec un autre gros congé de colle.

Achat d'une lampe baladeuse à LED 12V.

Nouvel essai d'étanchéité de la partie basse pour controler les pieds et là, loi de Murphy oblige, j'ai un paquet d'eau dans les pieds, snif.

Avant de rechercher la fuite, je vais préparer du lest pour mettre dans les pieds, donc préparation d'un moule en plâtre avec 3 empreintes de boitier pellicule photo.

Puis coulage des lests cylindriques en plomb, comme je ne sais pas combien il m'en faut, je vais provisoirement en mettre 3 de chaque coté, donc 2x 1,080Kg, je vais les mettre sur l'avant des pieds et caler le vide avec du styrodur.

J'avais dans mes tiroirs du ruban d'étanchéité pour filetage plomberie (Permacel).

J'en ai donc mis sur les filetages des pieds, j'ai rajouter mes lests en plomb et mon styrodur de calage, revisser les bouchons sans exagération car je me suis rendu compte que les joints plats des bouchons sautaient sur un serrage trop fort et nouvel essai d'étanchéité dans mon petit bac et là, c'est enfin bon, reste à voir avec une profondeur plus importante.

En attendant j'ai démonté l'optique de la baladeuse que j'ai collé au centre d'un des bouchons d100 et j'ai aussi peint en noir le dessus de ce bouchon.

Collage à la colle PVC de la demi bulle en prenant soin d'en scotcher le bas pour éviter les bavures de colle, retirer le scotch avant durcissement de la colle. Pour info. j'avais essayé de coller à l'araldite mais ça ne tient pas bien sur le PVC.

Préparation d'un poste de pilotage qui ira sur la partie supérieure du sous-marin, derrière le siège, il y a 3 cabochons pour mettre 3 LEDS de couleurs différentes(pompe en remplissage baxter, vidage baxter et détection présence d'eau dans le sous marin).

Collage à la colle PVC en prenant soin d'en scotcher le bas pour éviter les bavures de colle, retirer le scotch avant durcissement de la colle et voila, le pilote est dans sa bulle.

J'ai reçu mes moteurs Johnson 12v. type speed 380, je vais les fixer avec les lyres de 25-28mm (en fait, ils sont trop puissants, des 280 aurait suffi).

J'ai aussi reçu mes hélices de 30mm M2 avec pas à gauche et à droite, pour les fixer au moteur j'ai inséré un filetage M2 de chape aviation dans un tube laiton et inséré; ce dernier sur l'axe du moteur en collant le tout à la cyano, j'ai trouvé cette astuce sur le site:

Je viens de recevoir le baxter de 300ml que j'avais commandé chez rc-subwork.

En parallèle j'ai acheté une poche de perfusion en pharmacie (chlorure de sodium), elle fait 500ml, je ne sais pas encore laquelle je vais utiliser mais j'ai peur qu'avec 500ml la pression interne soit trop forte quand la poche est pleine d'eau et avoir des fuites ensuite.

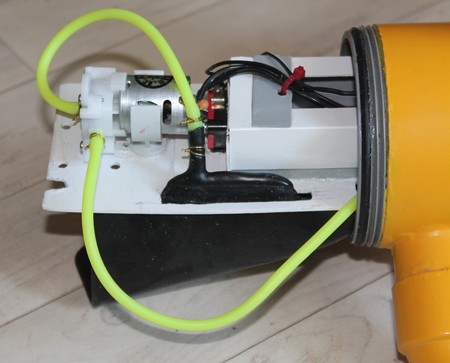
J'ai fixé (vissé + collé) les lyres sur le milieu de la coque car c'était plus facile que sur les pieds.

J'ai présenté les moteurs dessus. Les moteurs sont peints en noir et déparasités avec les condensateurs idoines.
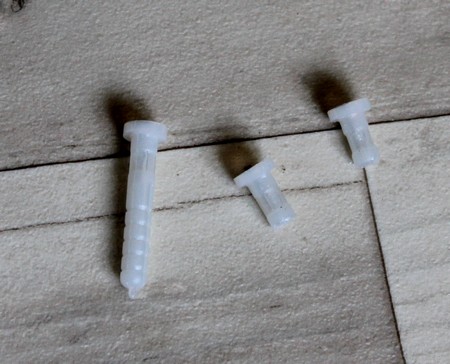
J'ai trouvé des chevilles plastique avec une collerette, je vais m'en servir de passe fils pour traverser la coque.

Voila, les passe coque sont en place, mes fils moteur sont passés, j'ai rajouté un morceau de cure dent et rempli le tube de colle PVC et collé le tout à la colle PVC, restera à tester l'étanchéité.

J'ai raccordé les fils moteur aux deux variateurs, raccordé un accu lipo 3S pour pouvoir tester les moteurs.
On utilise juste un des deux BEC des variateurs pour alimenter le récepteur, par contre les 2 fils signaux et moins de chaque bec sont raccordés.
Mais par contre, j'ai fait un mauvais choix de variateurs car ceux ci ont besoin de deux impulsions avec retour au neutre pour pouvoir passer en marche arrière, bon, c'est pas trop grave.
Si ça me pose trop de problèmes de navigation, il faudra envisager de les changer.

Préparation d'une plaque coulissante en "plasticard" qui servira à fixer l'électronique embarquée

Les glissières en PVC sont collées avec de la colle PVC, j'ai mal calculé l'emplacement des fixations moteurs et ces dernières gênent un peu le passage, j'aurais du coller les glissières en premier. Sous la plaque, il y a la place pour mettre le baxter.
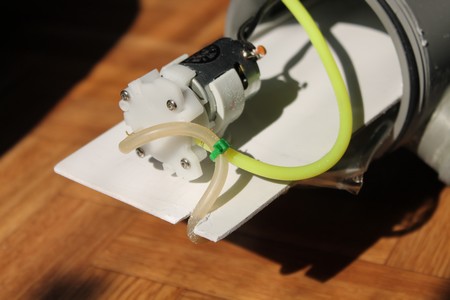
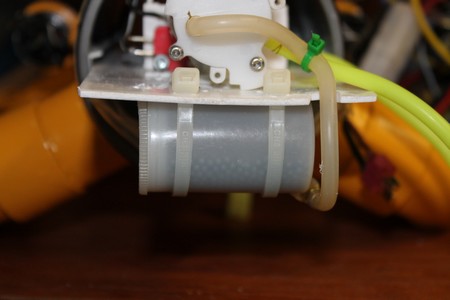
La pompe à engrenage de chez "Rc-subwork" trouve sa place en bout de platine à l'avant.

Et sous la platine le baxter de 500ml.

Confection d'un boitier en PVC pour loger la batterie LIPO de 5000mAH.

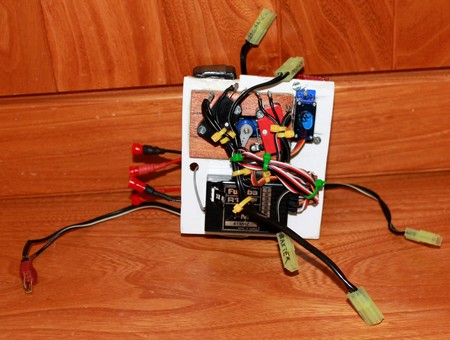
Mise en place d'une deuxième platine en Plasticard sur glissière qui recevra l'électronique.
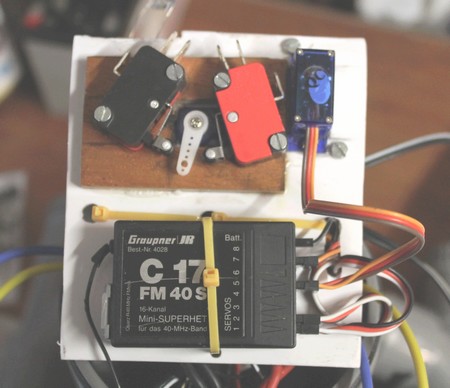
Sur une face de cette platine on trouve le récepteur en 41 Mhz (depuis j'ai changé de radio et mis une futaba, mixage plus simple), les switchs de commande de pompe et le servo pour l'éclairage avant.
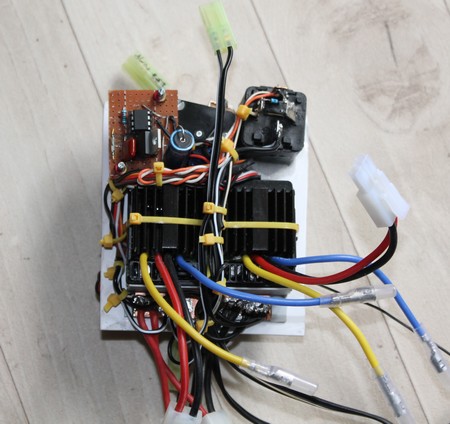
Sur l'autre face de la platine il y a la carte électronique pour l'interrupteur, les deux variateurs, le relais de mise sous tension, le servo de commande de pompe et le switch d'éclairage avant.
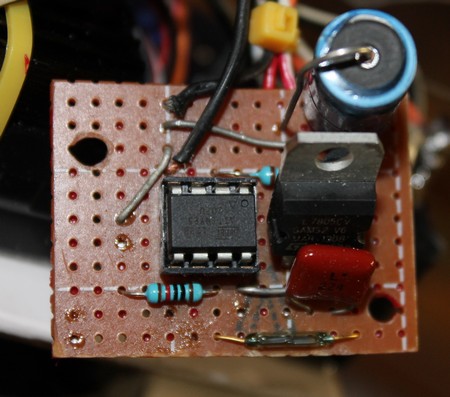
La platine électronique pour l'interrupteur est un ATtiny 85 piloté par un ILS, elle commande un relais.
Vous pouvez retrouvez le détail de cette carte sur ma page "ARDUINO".
Pour ceux qui ne souhaite pas utiliser Arduino, il est tout à fait possible de faire un interrupteur simple en mettant un shunt amovible à l'extérieur de la coque qui ouvrira le fil + de l'alimentation.
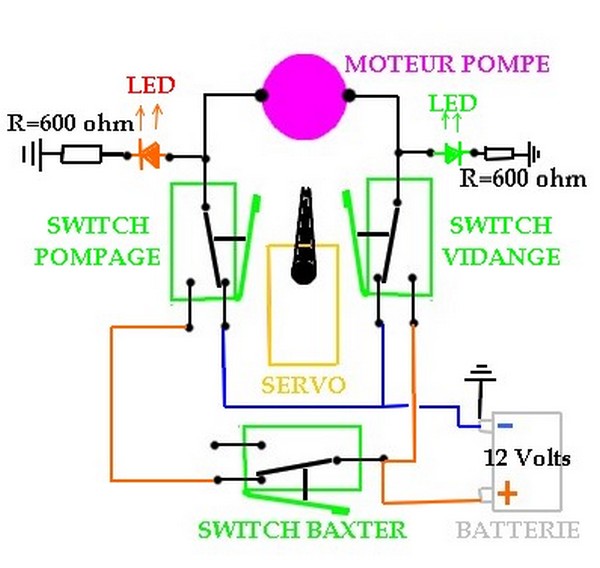
Voici le schéma de câblage des switchs de commande de la pompe.
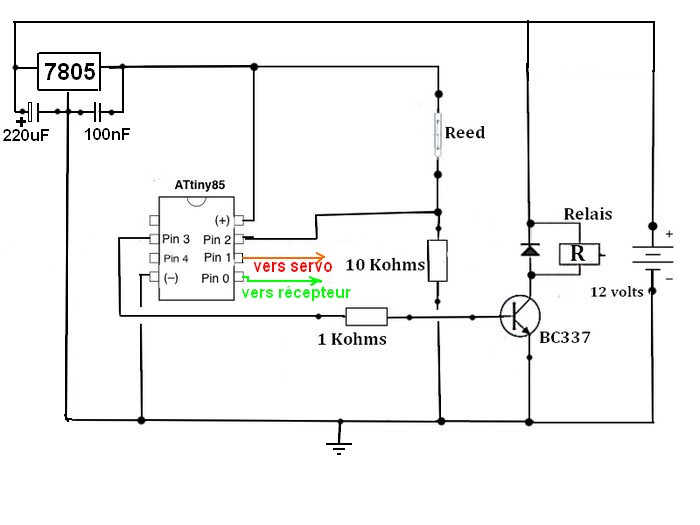
Voici le schéma de la platine interrupteur qui pilote un relais(voiture) de 12v. 30Amp. et qui intègre aussi un Fail-Safe (voir le détail sur ma page ARDUINO) .

Voila, tout est en place et fonctionne, prochaine étape, ponçage puis apprèt et peinture.

Un coup d'apprèt en bombe et peinture jaune de rigueur( en bombe aussi), nous voila prêt pour un nouvel essai.

L'essai dans mon bac en plastique ne permet pas de vraiment plonger, mais j'ai pu tester la flottabilité, Tuby relève légèrement du nez et le dome supérieur dépasse encore de l'eau donc ajout de 100gr de grenaille dans un boîtier pellicule photos.
Fixation de ce boîtier à l'avant, devant le baxter, ce système devrait me permettre un ajustement en poids si nécessaire.

Après un premier essai au bassin de la muette, j'ai trouvé que TUBY était trop enfoncé dans l'eau, donc retrait de plomb et échange du baxter pour en mettre un de 1 litre.
Ce dernier rentre limite, et m'oblige à pratiquer une découpe dans la platine pour faire passer le renflement latéral, j'ai aussi rajouté une durite rigide à l'intérieur du baxter pour pomper l'eau à la partie inférieure de ce dernier.
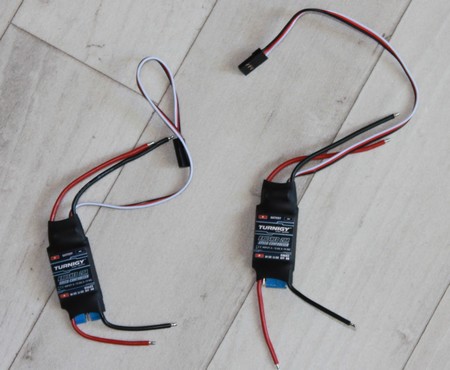
Cet essai m'a aussi fait voir que le pilotage était compliqué avec les premiers variateurs, donc changement de politique et essai avec des variateurs sans marche arrière (TURNIGY brushed 20A) et mixage radio modifié .
Platine électronique terminée, coté récepteur.
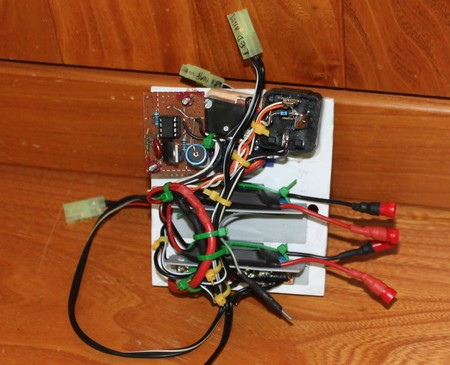
Platine coté nouveaux variateurs .

Paré à plonger pour un nouvel essai qui cette fois seras concluant, avec une grande maniabilité et malheureusement, une certaine lenteur à remplir le ballast en plongée statique.
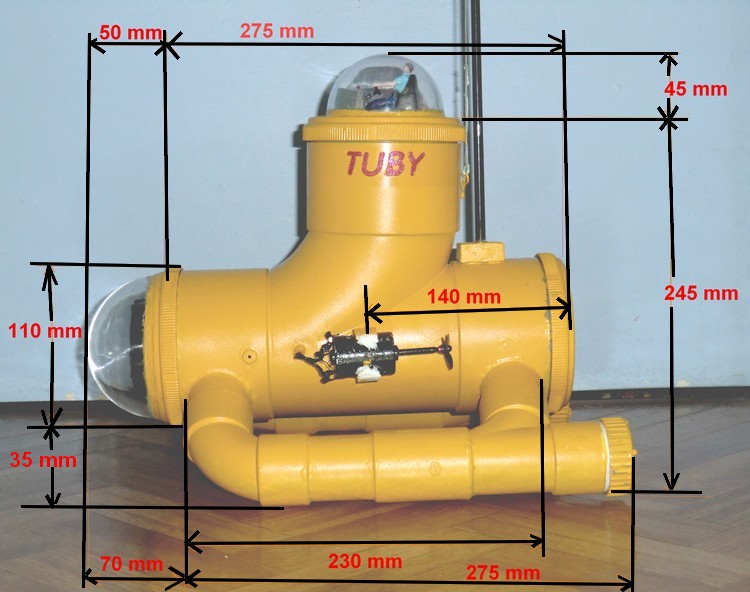
Voici les dimensions de "TUBY" .
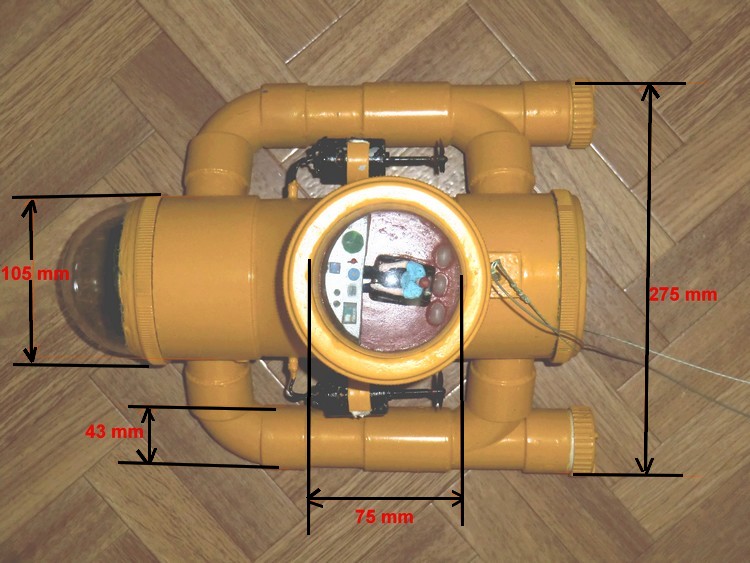
Pour un poids total avec la batterie LIPO de: 4,464 kg.

Mise en place d'une caméra étanche fixée avec une sangle (voir ce lien: "Banggood.com"